1.サーボモータ回路図の基本
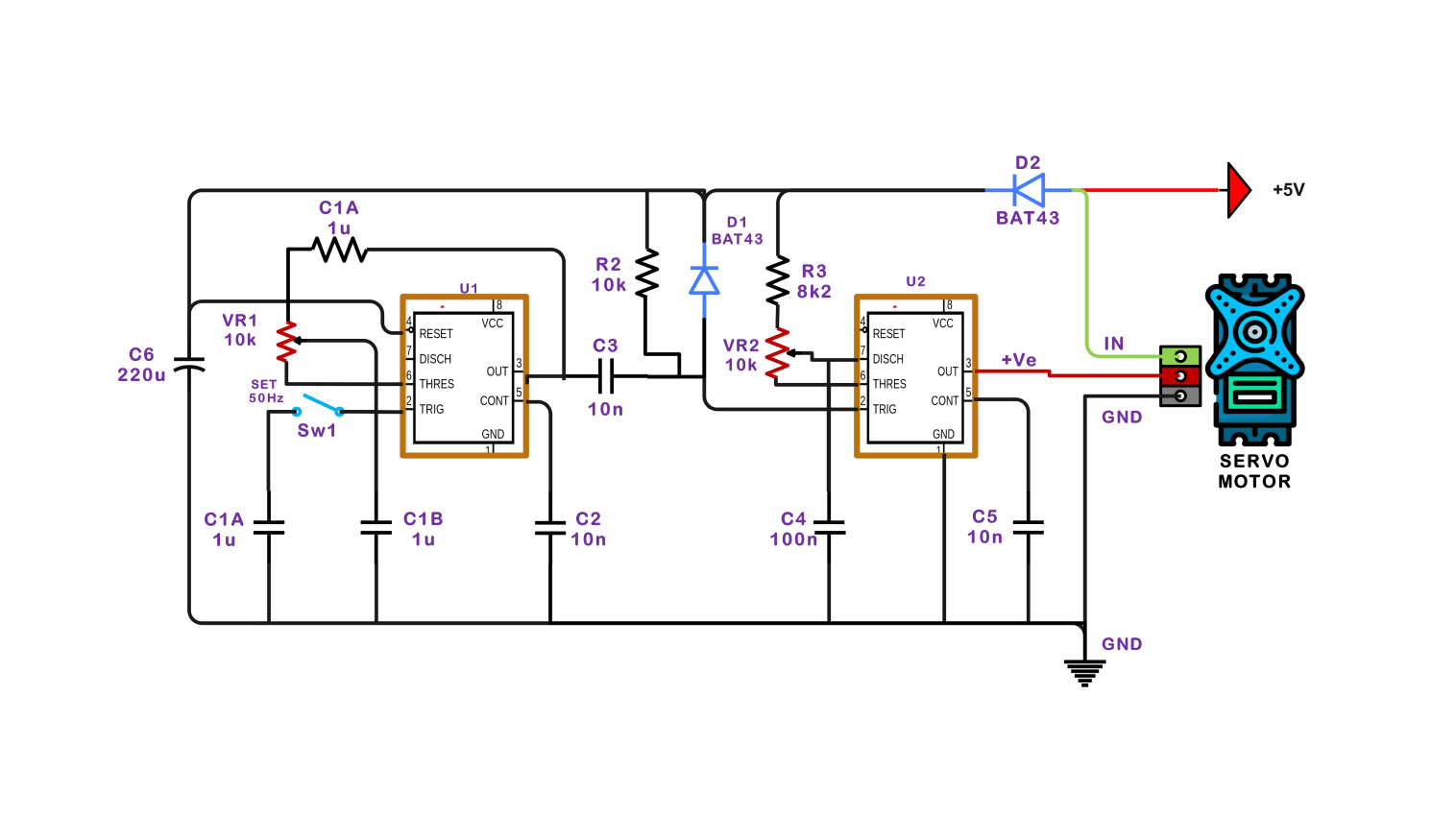
サーボモータ回路図は、指定した角度や位置に軸を動かし、その位置を保つための構成を読み取る図です。模型やロボット工作でよく使われるRCサーボでは、外から見える配線は比較的シンプルですが、内部ではモータ、減速ギア、位置検出器、制御回路が連携しています。したがって、回路図を読むときは「何本の線でつながるか」だけでなく、「どの信号がどの動きを決めるか」を押さえることが重要です。
また、サーボモータ回路図は用途によって見せ方が少し変わります。配線確認が目的なら3線の接続を強調した外部配線図が向いていますし、授業や説明資料では内部ブロック図も併記したほうが理解しやすくなります。テンプレートを作るときは、この二つを混ぜずに整理すると、見る人が迷いにくくなります。
2.配線図で見る3つの線
一般的なサーボモータは、電源(VCC)、GND、制御信号の3線で表されます。回路図では、まず電源電圧を明記しておくことが大切です。同じサーボでも使用条件によって定格電圧が異なるため、図の中に電圧条件がないと、配線そのものは合っていても運用時に混乱しやすくなります。
制御信号線は、マイコンや受信機から来る指令線です。この線は大電流を流す線ではなく、角度指示を伝えるための線として表現します。そのため、テンプレートでは電源ラインと信号ラインを色や線種で分けておくと、読み手が役割をすぐつかめます。学習用の図なら、コネクタ名、信号名、GND共通の注記を添えておくと配線ミスの防止にもつながります。
| 線 | 役割 | 図での書き方 |
|---|---|---|
| VCC | 電源供給 | 太めの色線で電圧注記を付ける |
| GND | 基準電位 | 共通接地として明示する |
| PWM | 角度指示 | 信号線として分離し、注記を添える |
3.内部回路の見方
サーボモータの特徴は、内部にフィードバック機構があることです。回路図やブロック図では、制御信号で決めた目標位置と、ポテンショメータが返す実際の軸角度を比較し、その偏差に応じた誤差増幅によってモータを駆動する流れを表します。この比例的なフィードバック制御こそが、普通のDCモータ駆動図との大きな違いです。
内部構成を説明する図では、モータ、減速ギア、ポテンショメータ(位置検出器)、制御回路の4つを核にすると整理しやすいです。ギアは機械要素ですが、出力軸の角度制御を理解するうえで外しにくいので、完全に省かず簡略化して入れるほうが自然です。フィードバック経路には矢印を使い、どちらが指示値でどちらが検出値かを明示すると、閉ループ制御の考え方がひと目で伝わります。
4.PWM信号をどう書くか
サーボモータ回路図でよく迷うのが、PWM信号をどこまで図に描くかです。配線図だけなら、信号線にPWMやパルス幅で角度を指示する旨を注記するだけでも十分な場合があります。ただ、初学者向けのページでは、それだけだと「なぜ速度ではなく角度が決まるのか」が見えにくくなります。
そのため、テンプレートでは回路図本体とは別に、小さな波形補足を添える構成が扱いやすいです。標準的なRCサーボでは、周期20ms(50Hz)のパルスを使い、パルス幅1msで一方の端(約0°)、1.5msで中立位置、2msで反対側の端(約180°)という対応関係になっています。この対応を簡潔に図示するだけで、制御信号の意味がつかみやすくなります。周波数やマイコン実装の細部まで広げると主題がぼやけるので、図の役割はあくまで「読み方の補助」に留めるのがちょうどよいです。
5.テンプレートで整理しやすい項目
サーボモータ回路図テンプレートを作るなら、最初から入れておきたい項目があります。具体的には、電源電圧、GND、制御信号名、コネクタ表記、可動範囲の補足、PWMパルス幅と角度の対応注記です。このあたりを定位置化しておくと、図を流用したときに毎回書き漏らしが出にくくなります。
凡例も有効です。たとえば、太線は電源、細線は信号、破線矢印はフィードバックというようにルールを先に決めておくと、1枚の図の中で情報の階層がそろいます。サーボは見た目の配線が単純な分、図の設計が雑だと内部の仕組みが伝わりません。情報を増やしすぎるより、役割ごとに整理して見せるほうが効果的です。
外部配線図と内部ブロック図を分けて整える場面では、EdrawMaxのように回路図を作成できるツールが役立つことがあります。回路図テンプレートがあるのでラベルや凡例の位置をそろえやすく、AIで回路図のたたき台を生成してから波形補足や注記を追加していく進め方にも向いています。授業用の整理や説明図の下書きを効率よく仕上げたい場合に、検討してみる価値があります。
よくある質問
-
サーボモータ回路図ではPWM波形を必ず描くべきですか。必須ではありません。配線確認が主目的なら、制御信号線にPWMで角度指示を行うと注記するだけでも通じます。ただ、学習用や説明用のページでは、小さな補足波形があると理解がかなり安定します。
-
DCモータの回路図と何が違いますか。大きな違いはフィードバックの有無です。DCモータの基本回路は回すための駆動中心ですが、サーボモータ回路図では目標位置と実位置の比較まで含めて考える必要があります。そのため、内部ブロック図を添える意味が出てきます。
-
電源ラインと制御信号ラインはなぜ分けて強調するのですか。役割がまったく違うからです。電源ラインは駆動に必要なエネルギーを供給し、制御信号ラインは指示を伝えます。図の中で分離しておくと、配線ミスの防止にもなり、どこに注目すべきかがわかりやすくなります。
-
教材用の図では内部ブロック図も一緒に入れたほうがよいですか。はい、導入用途では効果的です。外部配線図だけだと、なぜその信号で角度が決まるのかが見えにくいためです。外部配線と内部ブロックを並べると、回路と動作の対応がつかみやすくなります。